
Page 10 - CEGE Magazine Spring 2021
P. 10
FACULTYRESEARCH CONT...
The US Department of Transpor- tation (DOT) defines automated vehicles as “those in which at least some aspect of a safety- critical control function (e.g., steering, throttle, or braking) occurs without direct driver input. Automated vehicles may be autonomous (i.e., use only vehicle sensors) or may be connected (i.e., use communications sys- tems such as connected vehicle technology, in which cars and roadside infrastructure commu- nicate wirelessly). Connectivity is an important input to realizing
the full potential benefits and broad-scale implementation of automated vehicles.”
In the past decade, max-pressure con- trol techniques for traffic signal timing has moved from a mathematical con- struct to experimental testing on roads in India, Indonesia, and Israel—and, soon, in Minnesota.
AVs AND TRAFFIC FLOW
RAPHAEL STERN
researches vehi- cle automation and transportation cyber-physical systems. He is specifically inter-
ested in the impact of autonomous
(or semi-autonomous) vehicles on the overall traffic flow and dynamics at low
tion or a reduction in lanes are present. These traffic jams are often referred to as phantom jams because they seem to arise from nowhere. They are, however, the result of how drivers follow the ve- hicle in front of them. It takes just a few “bad drivers” to cause a traffic jam and increase travel time and fuel consump- tion for everyone on the road.
Similarly, it is possible that just a few “good drivers” could counteract imper- fect driving of others and reduce or even eliminate phantom jams. As AVs come closer to reality, there is a potential to leverage these vehicles to dampen traf- fic waves and eliminate phantom jams. Raphael Stern is working to design AV control strategies to improve the flow of traffic. Preliminary experimental results show that when only 5% of the traffic drives better, phantom jams can be nearly eliminated, which also reduces fuel consumption. Thus, the few AVs in the flow are making the traffic flow more smoothly and efficiently.
However, these preliminary results are not yet ready for deployment on real roads where lane changing, merging traffic, and bottlenecks still provide many potential triggers for traffic jams to emerge. Current research is focusing on how to make these driving strategies more robust and ready for implemen- tation.
In order to design control strategies that could deal with those real-driving triggers, we need a comprehensive un-
derstanding of how individual vehicles influence the traffic flow and emergence of phantom jams. Stern’s research ad- dresses how chang- es in driving behavior influence whether or not a phantom jam will occur.
autonomous capabilities. Vehicles with advanced driver assist features such as adaptive cruise control (ACC) allow the onboard computer to make decisions about following distance, braking, and acceleration. These vehicles represent the first generation of AVs, and they may already be changing flow-level traf- fic dynamics. As these features become mainstream, they will shift the compos- ite traffic flow (with both human drivers and AVs) behavior, which will influence the development of traffic phenomena such as phantom jams.
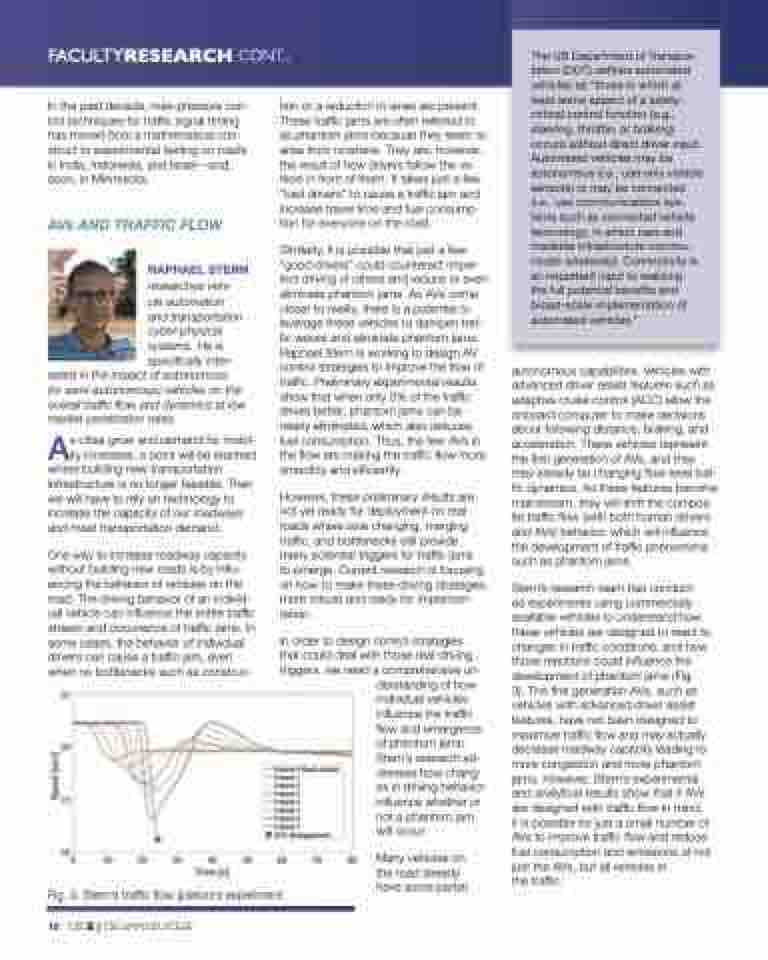
Stern’s research team has conduct- ed experiments using commercially available vehicles to understand how these vehicles are designed to react to changes in traffic conditions, and how those reactions could influence the development of phantom jams (Fig.
3). The first generation AVs, such as vehicles with advanced driver assist features, have not been designed to maximize traffic flow and may actually decrease roadway capacity leading to more congestion and more phantom jams. However, Stern’s experimental and analytical results show that if AVs are designed with traffic flow in mind, it is possible for just a small number of AVs to improve traffic flow and reduce fuel consumption and emissions of not just the AVs, but all vehicles in
the traffic.
arket penetration rates. mA
s cities grow and demand for mobil-
ity increases, a point will be reached where building new transportation infrastructure is no longer feasible. Then we will have to rely on technology to increase the capacity of our roadways and meet transportation demand.
One way to increase roadway capacity without building new roads is by influ- encing the behavior of vehicles on the road. The driving behavior of an individ- ual vehicle can influence the entire traffic stream and occurrence of traffic jams. In some cases, the behavior of individual drivers can cause a traffic jam, even when no bottlenecks such as construc-
Fig. 3. Stern’s traffic flow (platoon) experiment
10 CEGE | CSE.UMN.EDU/CEGE
Many vehicles on the road already have some partial
